Page Not Found
Page not found. Your pixels are in another canvas.
A list of all the posts and pages found on the site. For you robots out there is an XML version available for digesting as well.
Page not found. Your pixels are in another canvas.
About me
This is a page not in th emain menu
Published:
This post will show up by default. To disable scheduling of future posts, edit config.yml and set future: false.
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
A variety of common markup showing how the theme styles them.
Short description of portfolio item number 2 
Crucial for time critical applications like Autonomous Driving.
Sensor Fusion for EKF based SLAM. 
Leveraging deep learning techniques for ADAS, inspired by Tesla’s dashboard.
Deep learning based 3D reconstruction and novel view synthesis.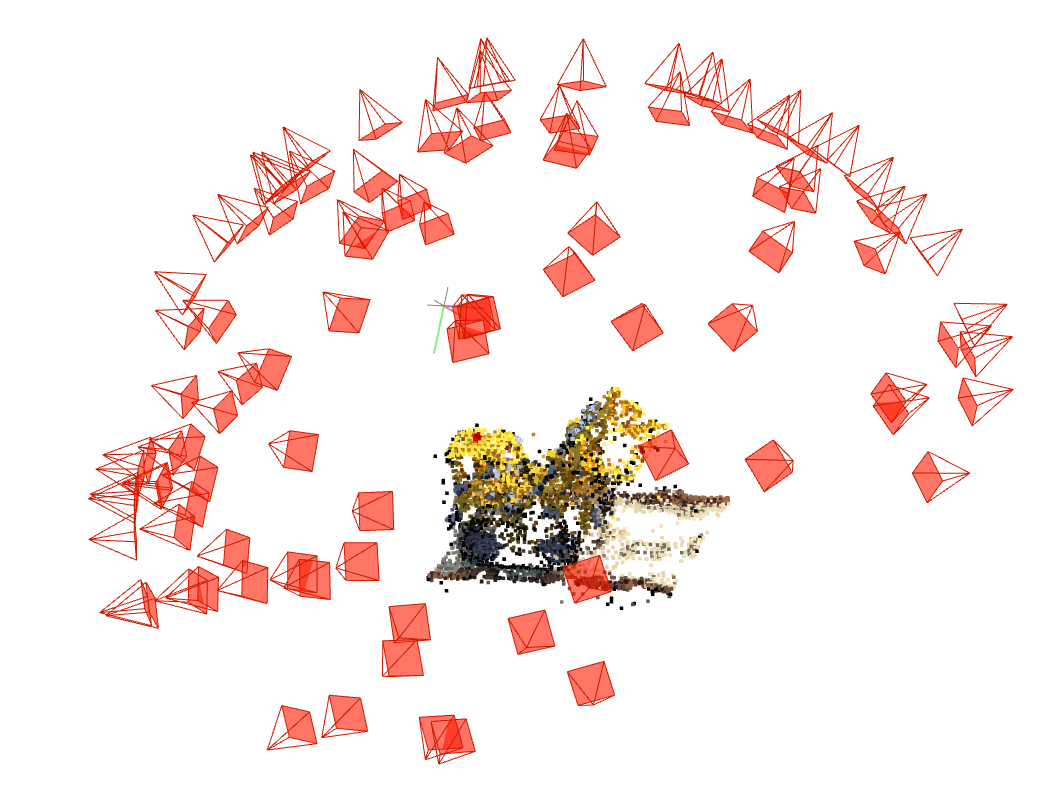
Classical computer vision based 3D reconstruction of scene from images. 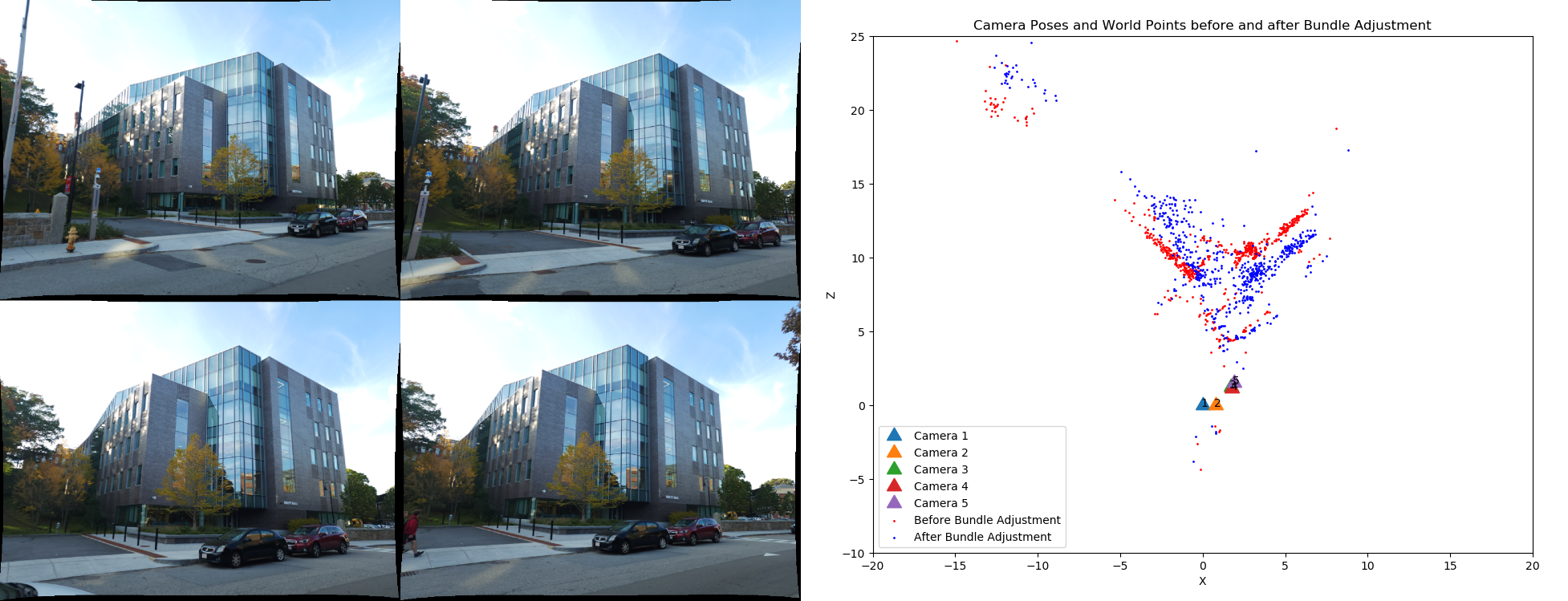
Stitch two or more images to create seamless panorama image.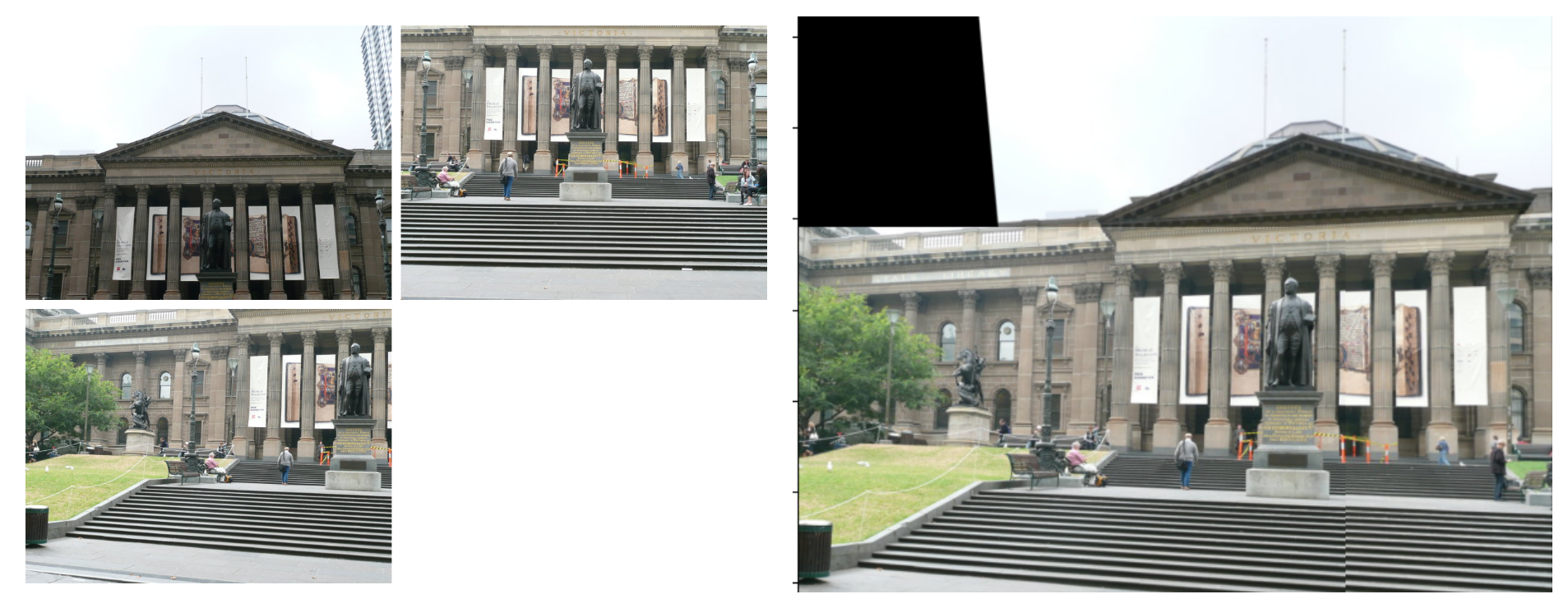
Forward, Inverse, Velocity Kinematics of a 4 dof manipulator.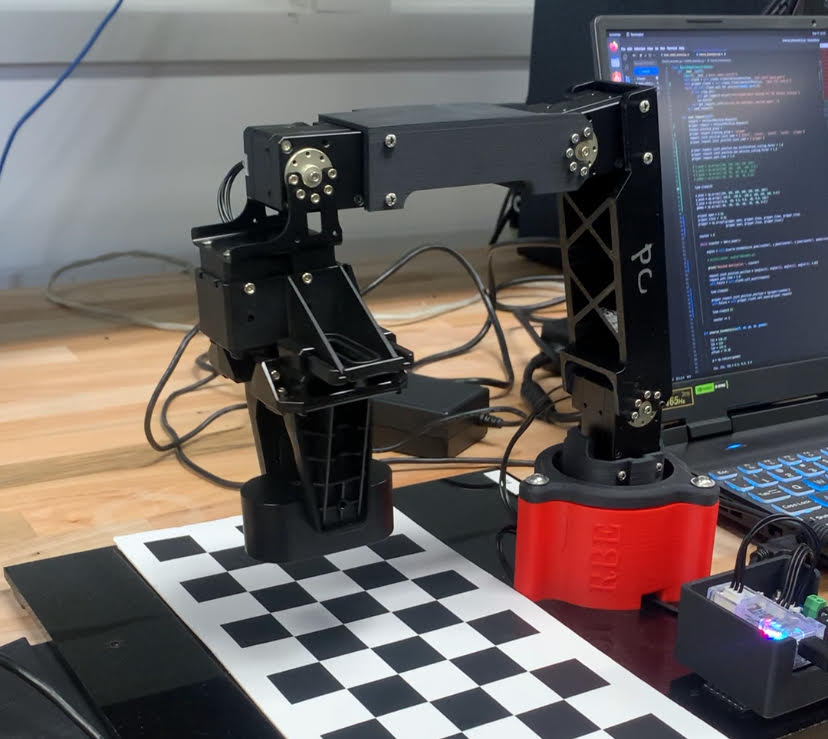
Plan a path for multiple robots simultaneously by treating the robots as a single composite system with many degrees of freedom.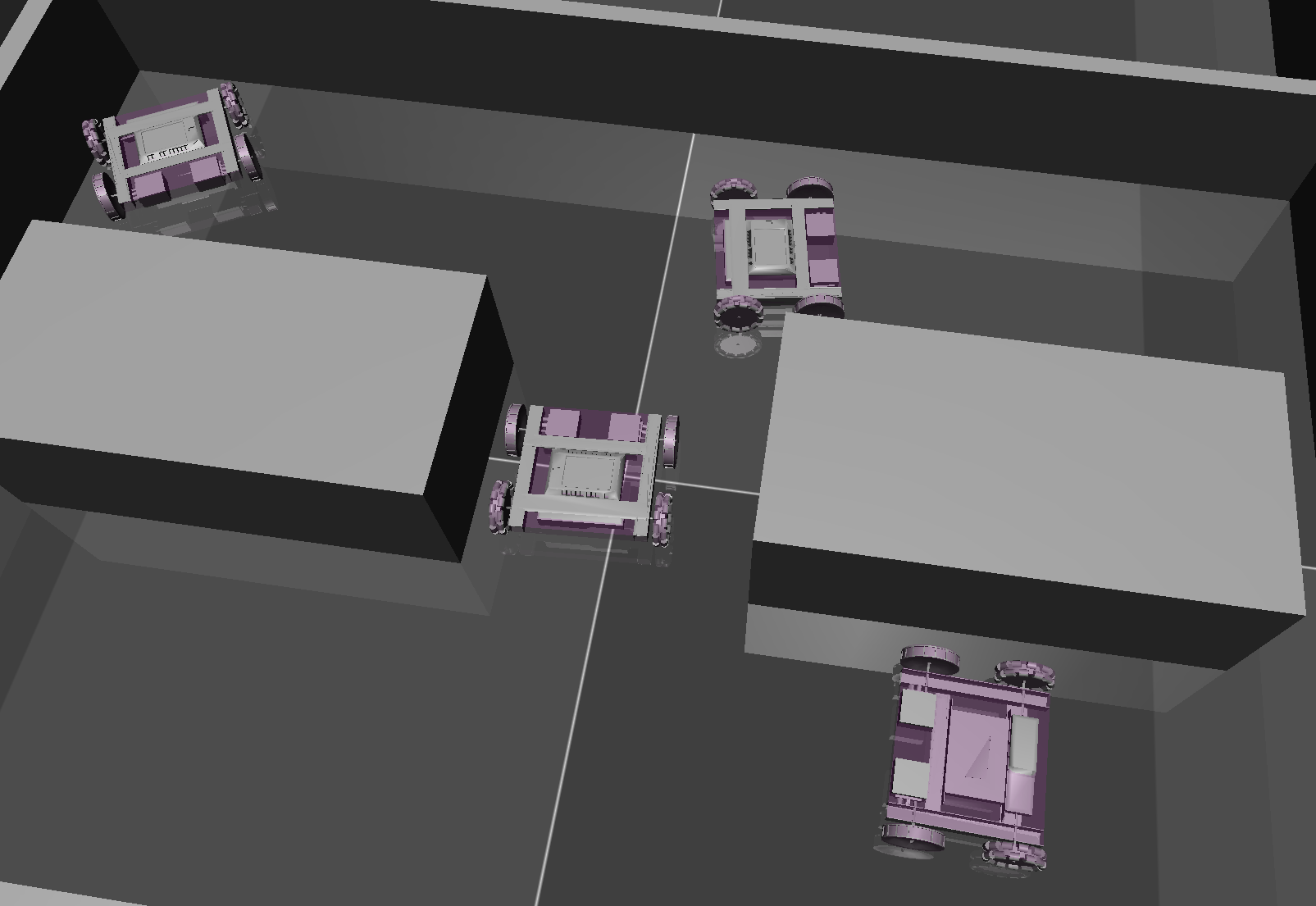
Path planning and obstacle avoidance of a multi-robot system (5 drones) for FOD (Foreign Object Debris) detection on runways.
Path planning and communication pipeline of a Drone interception system. 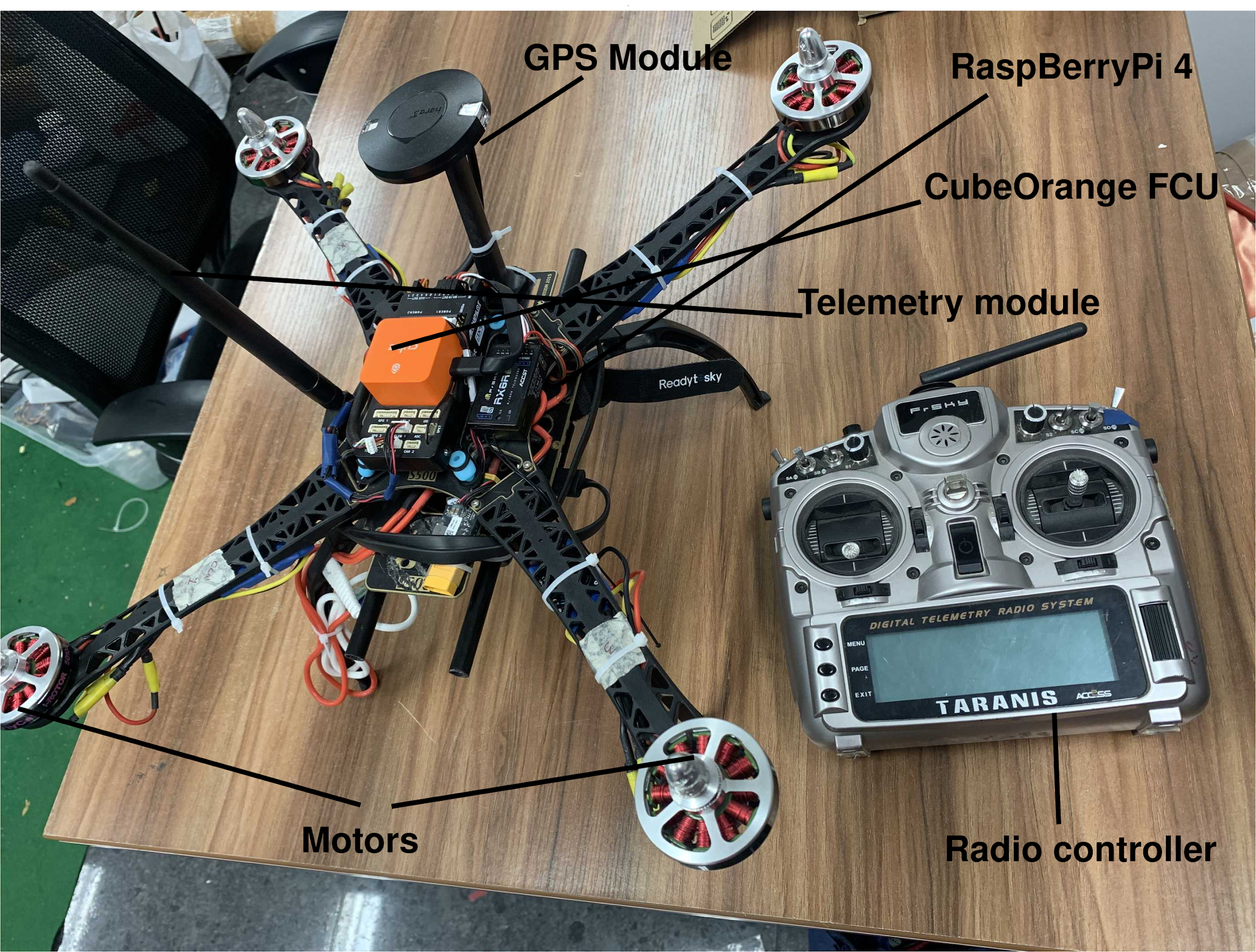
As a part of E-Yantra Robotics Competition 2021-22, theme: DairyBike.
Autonomous Landing of a UAV on a custom ground marker using Image Based Visual Servoing (IBVS). 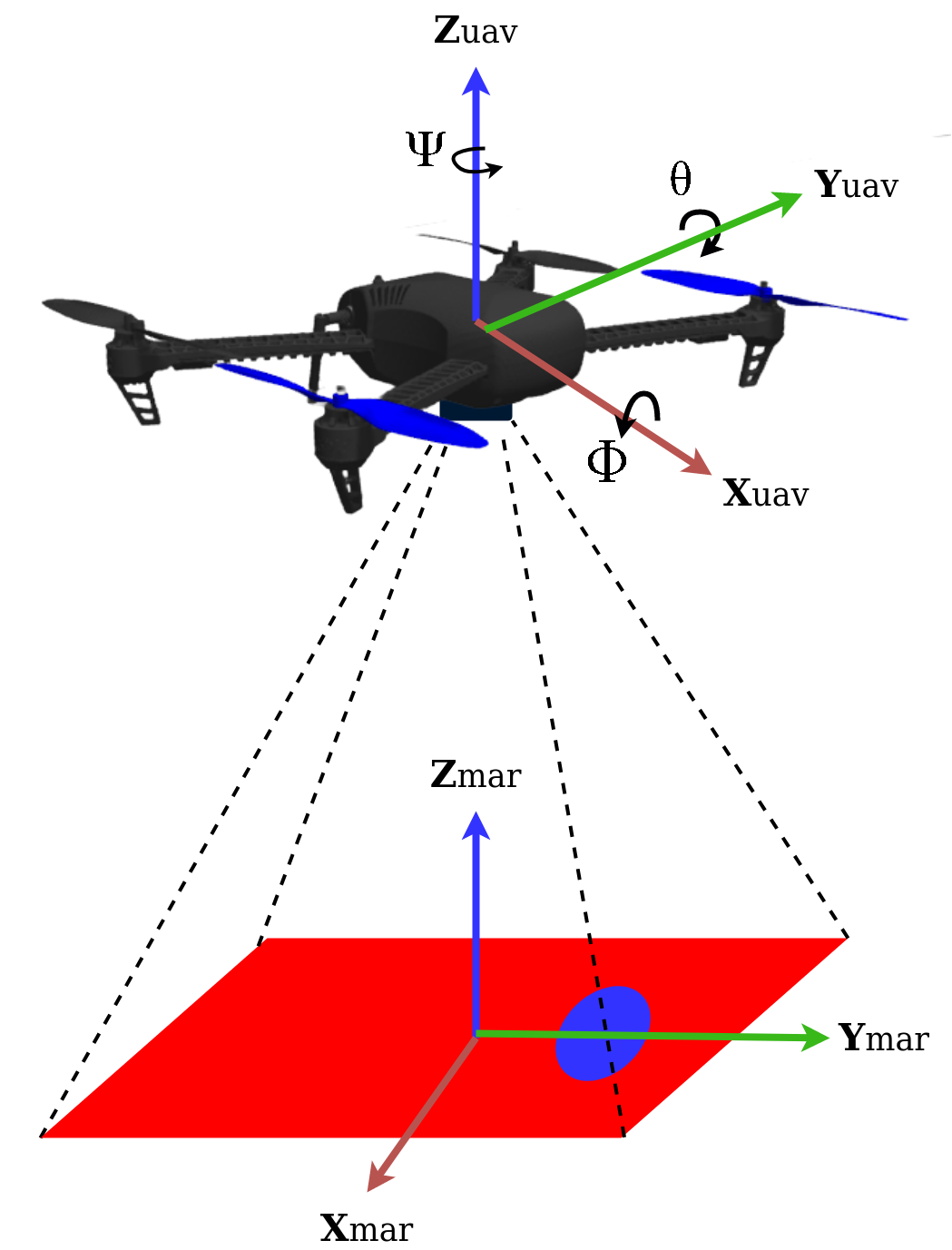
Coverage path planning of a multi-robot system in a rectangular grid with static known obstacles.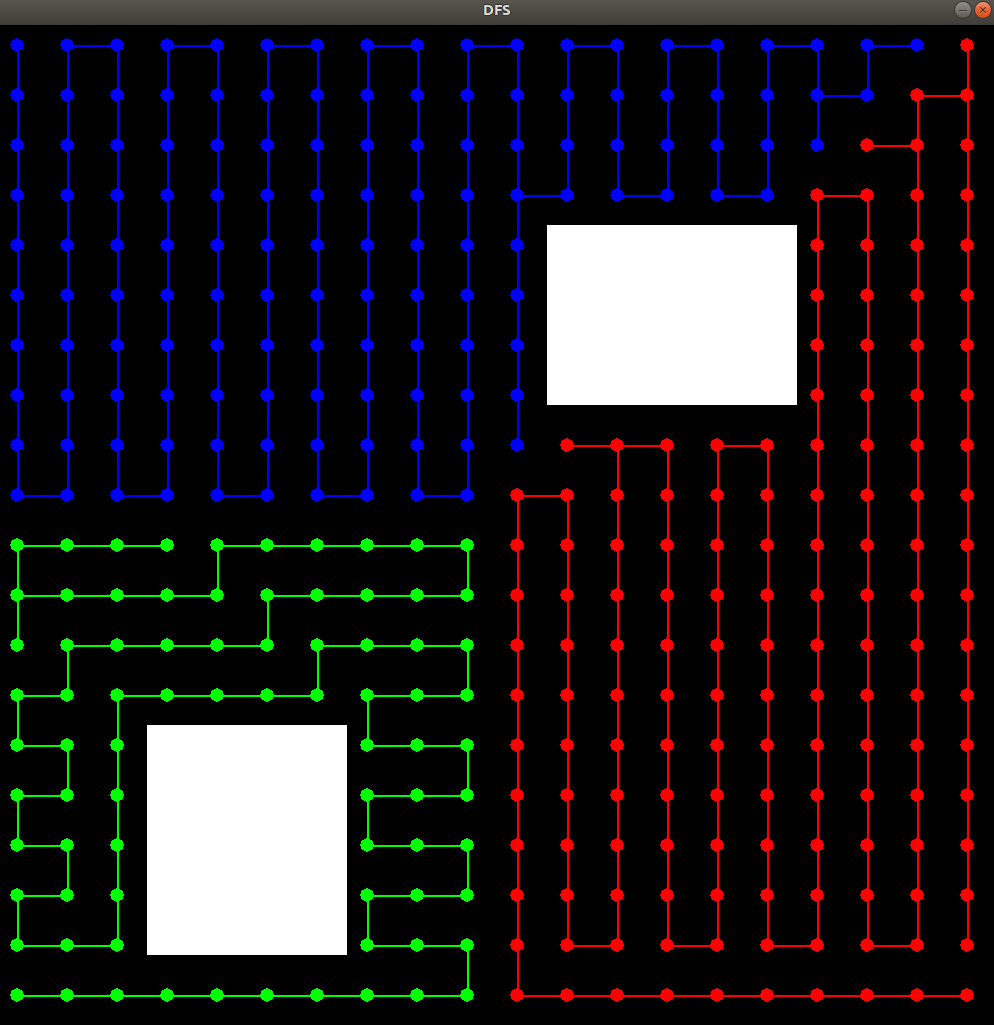
Implemented a PID controller and validated it by trajectory tracking.
Workshop, University 1, Department, 2015
This is a description of a teaching experience. You can use markdown like any other post.