Control of an Omnidirectional Micro Aerial Vehicle (OMAV)
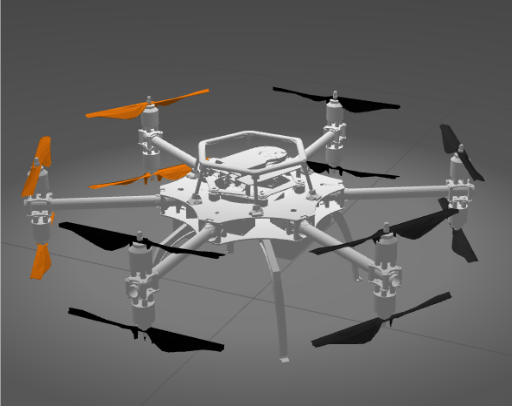
OMAV is a co-axial hexacopter with tiltable rotors. It is an over-actuated vehicle with a total of 18 actuators (12 rotors and 6 tilt motors). This makes it possible to hover the UAV in any arbitrary configuration.
This is shown in the following video.
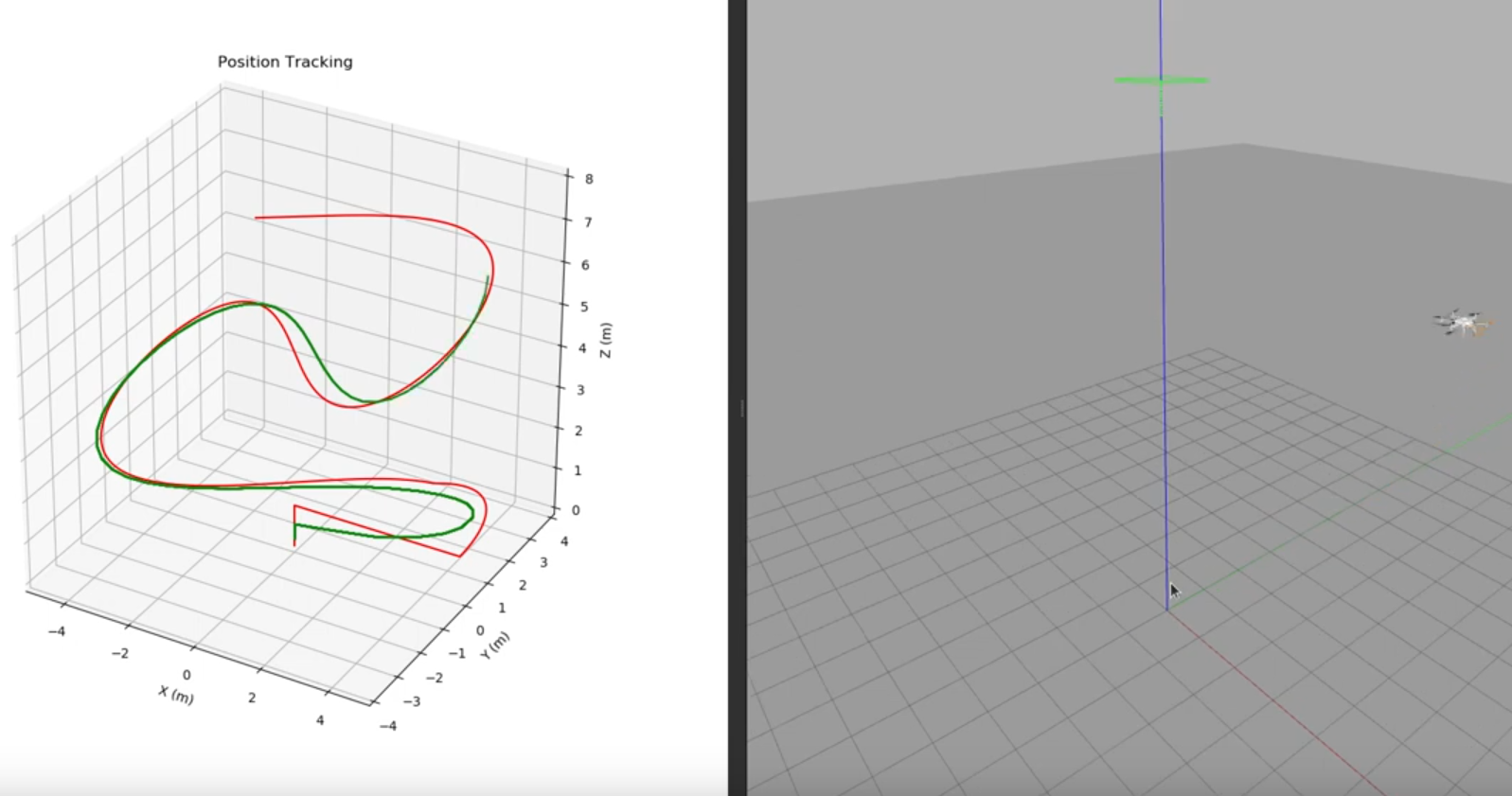
To test and validate the controller we performed trajectory tracking. This is shown in the following video.
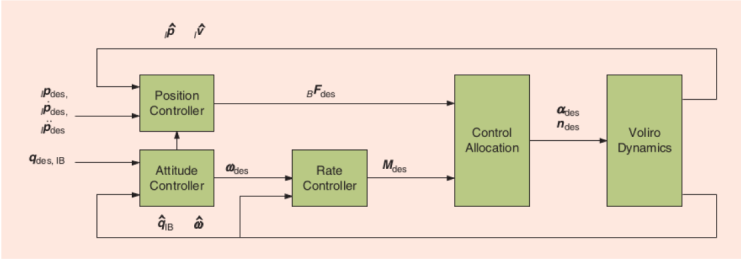
The control structure of OMAV is shown below.
 ”
”
Contributors: Muhammad Basil V. Mentors: Harmanjeet Singh Bilkhu, Smit Kesaria
Part of summer internship program at E-Yantra, IIT Bombay.