Decentralized Multi-Agent path planning
Implemented RVO (Reciprocal Velocity Obstacle) for obstacle avoidance and DFS (Depth First Search) algorithm for coverage to detect FODs on runways as a part of Meher Baba Challenge.
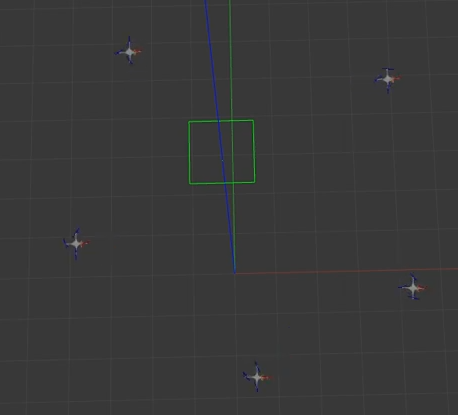
RVO implementation
5 drones are placed on the circumference of a circle equidistant from each other. Goal is to reach the diametrically opposite point on the circle avoiding each other. Click the image to watch RVO results.
Contributors: Suraj Bonagiri
Part of internship at Robotics Research Center, IIIT Hyderabad in collaboration with Arka Aerospace.