Panorama stitching
For more details - Project Report
Repository - Github
Stitching multiple images with 30 − 50% overlap to generate a panorama using classical approach. Steps involve corner detection, ANMS, feature extraction and matching, RANSAC and estimating homography.
Input data
Undistorted images
 ”
”
Corner detection
Harris corner & Adaptive Non-maximal Suppression (ANMS) for uniform distribution of features.
 ”
”
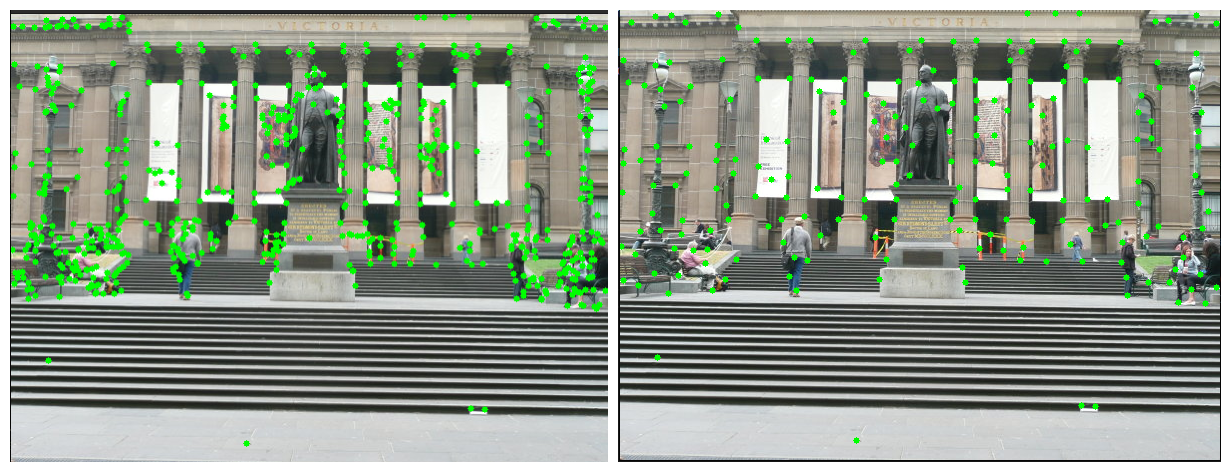
Feature matching and RANSAC for outlier rejection
Match keypoints (encoded as feature vectors) across pair of images. Refine the matches using RANSAC.
 ”
”
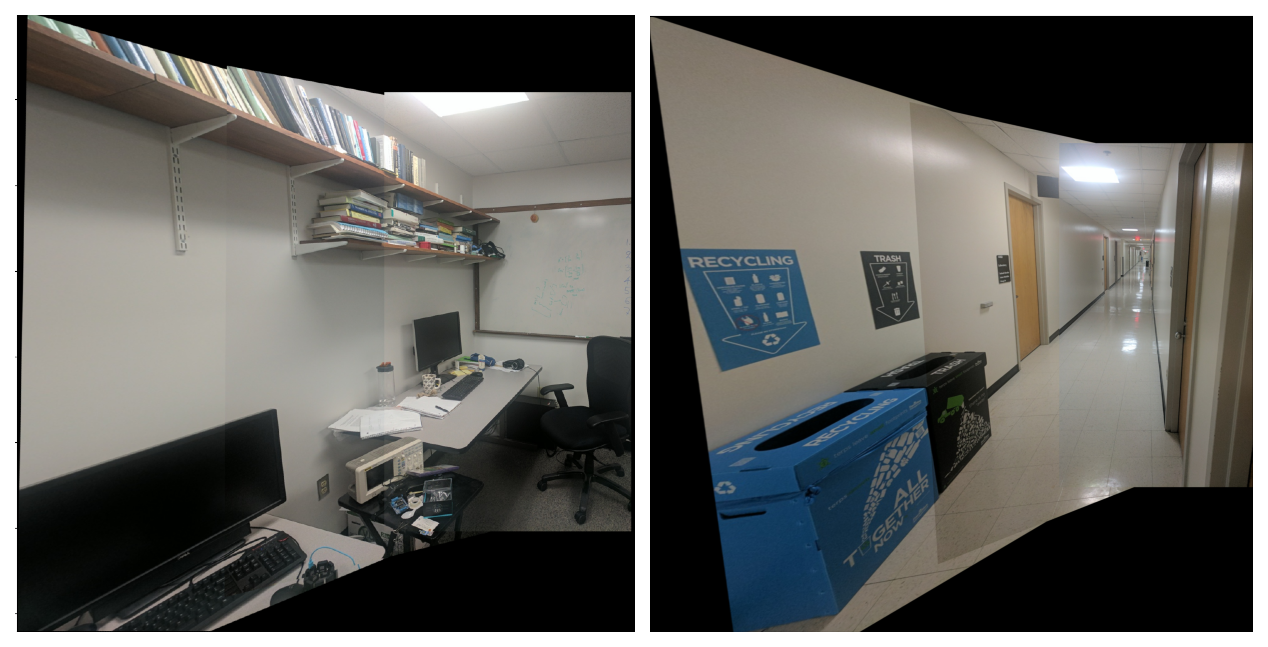
Stitch all images
Estimated homography using the refined matches, warp and stitch images with overlap.
 ”
”
More panoramas
 ”
”